模块化发明技巧。
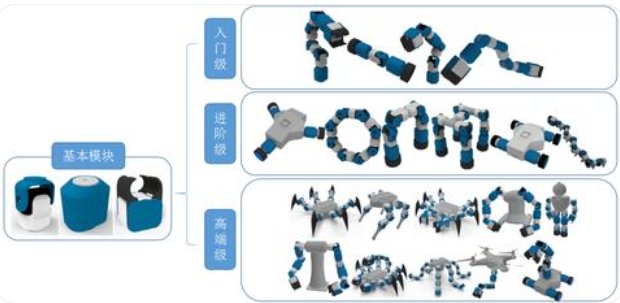
模块化机器人是利用了模块化思想进行发明创造产出的机器人,即模块化机器人是利用了模块化发明技巧。模块机器人(ModularRobots)是由标准的相互独立的制造模块组成,不同的模块组合在一起,由一个信息的控制系统控制,构成具有特殊功能的机器人。

模块化思想在柔性加工系统中得到日益广泛的重视.欧美有关研究机构从 80年代末就开始对模块机器人的研究 ,早期主要侧重于模块本身的研制,而近期则偏重于模块机器人应用领域的开拓。
模块机器人的研究可分为3个不同的领域,即模块机器人硬件的研究、控制的研究和根据不同应用的计算机辅助设计 ,迄今为止的大多数研究侧重于前两个领域的研究。目前,商业化的标准模块 (模块关节和模块连杆 )已经面市.模块机器人的出现无疑为柔性加工系统提供了更多的选择机会,但随之而来的问题是任务对象的千变万化、工作环境的不同,加之模块机器人的可随意组合—— 即模块机器人拓扑关系、模块关节及模块连杆的无穷组合,模块机器人设计成为具有挑战性课题摆在我们面前。
机器人计算机辅助设计课题一直为人们所关注,B.O.N naji在1986年出版了“机器人计算机辅助设计、选择与评价”的专著。他对可能组成机器人的 4个关节的运动范围、速度进行分度编码,并对执行器,关节驱动单元、关节控制单元、设计参数等共 89个参数进行了定性或定量地 (16分度 )规定. Nnaji还对如何根据设计要求确定相关代码给出了程序流程,这为机器人计算机辅助设计开创了先河. K-H Wurst 在开发模块机器人的同时也给出了选择模块的一般原则。前者的研究主要针对一般机器人如何根据设计参数确定代码,从而确定满足设计要求的机器人拓扑关系和结构参数 ,这在设计新型机器人时有着一定的指导意义。